
La navigazione d'una nave, navetto o di qualsiasi altro mezzo spaziale può avvenire in due modalità.
La prima, più usata, è quella per coordinate assolute.
Il timoniere immette 3 coordinate, genericamente X, Y e Z che individuano un punto nello spazio in un sistema cartesiano che ha origine al centro della nostra Galassia.

Il computer di bordo provvede a calcolare ed immettere la rotta più breve, considerando pianeti, corpi astrali, anomalie a tutte le altre informazioni disponibili el database, evitando di entrare in altri sistemi se non in quello d'arrivo.
Una volta attivata la rotta calcolata dal computer, la nave procederà automaticamente fino al punto immesso e si fermerà automaticamente al raggiungimento delle coordinate. Ovviamente farà così, alla velocità impostata dal timoniere e sarà compito del medesimo occuparsi di impostare le velocità corrette man mano che la nave proceda. Quindi dovrà ad esempio passare dai motori a curvatura a quelli di impulso all'entrata in un sistema.
Convenzionate con il sistema che origina al centro della galassia si trovano molte coordinate di Pianeti, o stazioni nel Database di ogni Nave federale in modo tale da permettere al timoniere di immetere semplicemente il nome del Pianeta/Stazione d'arrivo anzichè le tre coordinate.
La seconda modalità di navigare è quella di immettere una rotta relativa.
In questo caso il timoniere immette due cooridinte, genericamente x ed y, che ruotano la nave di x gradi in senso orario (se x è compreso tra 1 e 180) o antiorario (se x è compreso tra 181 e 359) e di y gradi verso l'alto (se y è compreso tra 1 e 180) o verso il basso (se y è compreso tra 181 e 359).


In questa modalità sarà compito del timoniere verificare che la rotta sia libera da corpi o fenomeni astrali e controllare che tale rotta non passi attraverso altisistemi se non quello d'arrivo.
a cura di Garon Jols
+ [SECLAR 1] - File ID: 2954 - Ultima Modifica File: 03/02/2380 22:04 - Data Stellare: 57092.86 - Autore: Bobking
TESI DI VOLO AVANZATO
La presente tesi e divisa in 5 capitoli cosi divisi:
- Capitolo 01 ( decollo dalla base di terra)
- Capitolo 02 ( decollo dalle stazioni orbitanti e navi stellari )
- Capitolo 03 ( muoversi nello spazio )
- Capitolo 04 ( i compiti della conn , comm , sco , xco , co ,
manovre di emergenza )
- Capitolo 05 ( il deflettore di navigazione, boe temporali )
ogni capitolo cercherà di fornire il maggior numero possibile di delucidazioni .
Capitolo 01
– Il decollo dalle basi sui pianeti.
A differenza di quanti si possa credere le procedure di volo ed atterraggio da un pianeta o da una stazione spaziale non sono identiche tranne che nella prima fase analizziamoli in dettaglio.
- procedure di decollo da una base di terra.
1) Posizionarsi alla postazione CONN dare energia alla consol portandole attivandola
2) Attivare i programmi diagnostici dei sistemi liv. 4 eseguendo cosi una verifica su tutti i sistemi
di bordo
3) Verificare la reale posizione del veicolo. .
4) Aprire un canale con il controllo volo e chiedere in ordine:
- autorizzazione al decollo.
- assegnazione vettore ( per quando siete fuori dal hangar )
- ed assegnazione pista.
5) Disattivare le morse magnetiche
6) Attivare i razzi di manovra fino al raggiungimento della pista assegnata
7) Allineare unita alla pista
8) Sincronizzare le armoniche della navetta con gli scudi del hangar
9) Uscire dal hangar.
10) Usando solo i razzi di manovra raggiungere atmosfera fino al raggiungimento dello spazio
11) Una volta nello spazio attivare i motori ad impulso ed impostare una rotta dopo aver verifica
assenza di ostacoli.
- procedure di atterraggio verso una base di terra.
1) Eseguire una diagnostica liv. 4 su tutti i sistemi della navetta
2) Avvicinarsi alla atmosfera ad ¼ di impulso
3) Attivare i razzi di manovra appena si arriva in prossimità del pianeta
4) Aprire un canale con il controllo volo di dove si atterrare chiedendo:
- autorizzazione ad atterrare.
- assegnazione vettore ( per quando siete fuori dal hangar )
- ed assegnazione pista.
5) Entrare in atmosfera usando solo i razzi di manovra
6) Dirigersi verso hangar assegnato
7) Sincronizzare le armoniche degli scudi del mezzo con quelli del hangar
8) Entrare nel hangar
9) Raggiungere la pista assegnata ed allinearsi alle morse magnetiche
10) Avvicinarsi lentamente alle morse e poi attivarle
11) Spegnere tutto.
Capitolo 02
– Il decollo dalle basi spaziali e navi stellari.
- procedure di decollo da una stazione spaziale o nave stellare
1) Posizionarsi alla postazione CONN dare energia alla consol portandole
attivandola
2) Attivare i programmi diagnostici dei sistemi liv. 4 eseguendo cosi una
verifica su tutti i sistemi di bordo .
3) Verificare la reale posizione del veicolo.
4) Aprire un canale con il controllo volo e chiedere in ordine:
- autorizzazione al decollo.
- assegnazione pista di uscita hangar.
- ed assegnazione vettore ( per quando siete fuori dal hangar )
5) Disattiva la morsa di attracco del pilone ed attivare i propulsori di
manovra al minimo iniziando ad allontanarsi.
6) Allinearsi alla pista fino ad alliniamento completo della uscita del
hangar.
7) Sincronizzare le armoniche degli scudi della navetta con quelli della
base dalla quale si sta decollando.
8) Uscire dal hangar usando solo i razzi di manovra.
9) Attivare i motori ad impulso ad ¼ e raggiungere la distanza di
sicurezza dalla base.
- procedure di rientro in una base stellare o nave stellare
1) Allinearsi alla base o alla nave stellare su cui si deve fare rientro
2) Aprire un canale con il controllo volo e chiedere in ordine:
- autorizzazione al atterraggio.
- assegnazione vettore ( per quando siete fuori dal hangar )
- ed assegnazione pista.
3) Sincronizzare le armoniche dalla navetta con quelle della base /nave
stellare
4) Diminuire la velocità fino ad ¼ di impulso e fino al raggiungimento
della distanza di sicurezza
5) Spegnere i motori ad impulso ed attivare i razzi di manovra
6) Avvicinarsi al hangar
7) Entrare nel hangar usando solo i razzi di manovra
8) Procedura di attracco e bloccaggio delle morse
9) Spegnere i motori ed i sistemi della navetta
Capitolo 03
- Muoversi nello spazio.
Attualmente la flotta stellare dispone di 3 tipi di propulsione per lo spazio propulsori di manovra , motori ad impulso , motori a curvatura , tali dispositivi sono presenti su tutte le navi stellari e navette di qualsiasi tipo e classe, ma analizziamoli in dettaglio:
- Motori di manovra
I motori di manovra permettono piccoli precisi spostamento del mezzo , la loro applicazione principale e procedura di attracco , decollo , atterraggio sono posti sui 4 lati del mezzo ed inoltre sono presenti sia sul ventre che sulla dorsale dei mezzi.
- Propulsori ad impulso
Permettono il movimento delle unita a velocità subluce ,ed inoltre si usano in tutti gli spostamenti che non richiedano la velocità curvatura o comunque dove non e richiesta percorre una grande distanza. Un altro uso dei propulsori di manovra e entrata in orbita , allontanamento avvicinamento hai moli spaziali ed ormeggi inoltre sono usati in tutti gli
spazi dove e vietato uso della velocità warp, inoltre i motori ad impulso sono usati negli scontri contro altre unita.
Le impostazioni di velocità relative a questo tipo di propulsio comunemente espresse tramite frazione: 1 = potenza massima, poi 1/2, 2/3, 1/4 e via dicendo.
Note: in caso di danni ai motori ad impulso (o se si verifica una perdita di energia) 1 corrisponda alla potenza disponibile.
Note storiche: Le prime versioni del motore a impulso spingevano le navi a velocità subluce. Dopo gli esperimenti sulle navi stellari di classe Ambassador all'inizio dei XXIV secolo, nel sistema viene introdotto un gruppo di bobine motrici; per imprimere alle navi stellari successive, più grandi, la giusta accelerazione, è necessario impiegare una bobina motrice di compattazione spazio-temporale a fusione in aggiunta al motore a impulso. Infatti, un semplice elemento motore a reazione newtoniana non sarebbe sufficiente.
Note tecniche: In situazioni di emergenza, una piccola quantità di antimateria può essere immessa nella camera di reazione a impulso per aumentare l'emissione di energia.
Sulle navi di classe Constitution i motori a impulso sono situati sull'estremità di poppa della sezione a disco. Sulle navi di classe Galaxy, il motore a impulso principale è composto da quattro motori raggruppati sulla poppa del ponte 23 dello scafo della sala macchine; la sezione a disco viene spinta da due motori, ognuno formato da un gruppo di due a poppa del ponte 10. Ogni motore è composto da una camera di reazione a impulso, un generatore/acceleratore, un gruppo di bobine motrici e il direzionatore dello scarico vettorizzato.
Sulle navi stellari di classe Galaxy, il carburante per il motore principale viene conservato nel serbatoio principale di deuterio. Il deposito di antirnateria per il motore principale si trova sui ponti 41 e 42. Tutti i serbatoi di carburante sono costituiti da strati alternati di cortanio 2378 a matrice forzata e da acciaio inossidabile. Il carburante per il motore a impulso della sezione a disco viene fornito da 32 serbatoi criogenici ausiliari.
A causa della natura dell'energia rilasciata durante il processo di fusione, il sistema di propulsione a impulso necessita di una manutenzione superiore rispetto al sistema a curvatura, anche se i motori a curvatura producono una quantità di energia milioni di volte superiore ai motori a impulso.
All'interno del reattore
La camera di reazione a impulso è una sfera del diametro di sei metri. Il deuterio viene introdotto nella sfera, dove avviene una reazione di fusione protone-protone standard. L'emissione totale istantanea di energia di una camera di reazione a impulso può variare tra i 108 e i 1011 megawatt. Una nave stellare di classe Galaxy trasporta solitamente quattro moduli di camera di reazione a impulso di ricambio.
Quattro motori a impulso vengono utilizzati per spingere la nave, la velocità del plasma viene aumentata e incanalata nelle bobine motrici spazio-temporali. Quando i motori a impulso sono usati solo come fonte di energia, il plasma viene deviato dal sistema EPS alla rete di distribuzione dell'energia della nave.
- Motori a curvatura
I motori a curvatura sono conosciuti anche con il nome di propulsione warp , questo l tipo di motore permette di viaggiare a velocità superiore della luce , permettendo alle navi stellari di percorrere grandi distanze in tempi relativamente brevi . la velocità viene espressa come scala warp che parte da warp 1.0 fino a warp 9.99 tuttavia non tutte le navi stellari possono viaggiare alla massima velocità ed inoltre quello che possono viaggiare a tele velocità non possono tenere i motori sempre al massimo ma solo per brevi periodi conosciuti come velocità di fuga o velocità massima di inseguimento d’emergenza.
Note: attualmente e in fase di sviluppo teorico un nuovo tipo di motore conosciuto come transcurvatura attualmente le specie conosciute che dispongono di tale propulsione risultano essere i borg , comunque da diversi anni molti ricercatori federali stano cercando di mettere a punto tale tipo di motore che ci consentirebbe di superera il limite attuale di warp 9.99.
Capitolo 04 I compiti della conn , comm , sxo , xo , co , le manovre d’emergenza.
- Capitolo 4.1 CONN
Le funzioni della postazione del timoniere sono principalmente 5 e sono :
1) Tracciare la rotta e verificarla .
2) Verificare continuamente il volo automatico ed essere pronto ad
intervenire in caso di guasto del sistema.
3) Operazioni di volo manuale quando richieste tipo campi di asteroidi.
4) Verifica della posizione del ‘unita.
5) Svolgere la funzione di ufficiale di collegamento tra la plancia e la
sezione ingegneria.
Inoltre durante il volo con i motori ad impulso il timoniere ha obbligo di verificare tutti i sistemi di smorzamento della nave, inoltre in caso di manovre eccedenti le capacita del sistema , il computer richiede al timoniere di effettuare gli aggiustamenti in modalità manuale per rientrare nei parametri standar.
Note: durante lo stato di allarme il timoniere e autorizzato ad effettuare manovre che sono potenzialmente pericolose per l’equipaggio o la stessa unita, inoltre durante il volo manuale si attiva una particolare funzione che permette al timoniere di ricevere direttamente i dati dai sensori di navigazione ,altra funzione del timoniere durante il volo a curvatura e la verifica periodica della geometria del campo di curvatura che va effettuate in parallelo con la sezione ingegneria
- Capitolo 4.2 COMM
Le funzioni della comm sono:
1) controllare tutte le comunicazioni in entrata ed uscita dall’unita
2) tradurre con il traduttore ogni messaggio
3) decodificare e codificare i messaggi verso il comando di flotta
4) essere pronto ad intervenire in caso di malora del timoniere o
malfunzionamento della postazione
- Capitolo 4.3 SXO
Il secondo Ufficiale o SXO e il terzo ufficiale nella catena di comando, affianca il comandante ed il Primo Ufficiale. In assenza dei due ufficiali appena citati è a tutti gli effetti la persona che ha la massima autorità sulla nave.
Note: Può appartenere a qualsiasi sezione (Tuttavia è necessario, per ricoprire tale ruolo, ottenere l´Abilitazione al Comando).
- Capitolo 4.4 XO
Il primo ufficiale e il secondo nella catena di comando svolge tutti i ruoli che normalmente sono di competenza del capitano in sua assenza , inoltre e la seconda autorità sulla nave, oltre a questo ha 3 compiti fondamentali:
1) Qualora il capitano muoia, sia inabilitato, disperso o per qualche
ragione non possa rimanere al comando del vascello.
2) Sollevare il capitano dal comando se, per qualunque motivo, sia
palesemente incompetente o incapace di ottemperare ai suoi doveri di
ufficiale comandante.
3) Fornire suggerimenti al comandate ed una rosa di opzioni al
comandante.
Note: Deve appartenere alla sezione Comando e Navigazione (Tuttavia è possibile diventare Primi Ufficiali anche venendo da altre sezioni , ma ottenendo prima l´Abilitazione al Comando e poi il Trasferimento di Sezione).
Note storiche: Fino alla fine dei XXIII secolo, il primo ufficiale aveva spesso un incarico aggiuntivo a bordo della nave stellare, per esempio, nel caso del Signor Spock, quello di ufficiale scientifico della U.S.S. Enterpríse NCC-1701, ma a partire dal XXIV secolo, poiché le navi stellari si fanno sempre più imponenti e articolate, il primo ufficiale va assumendo un profilo specifico.
Note in caso di esonerò del comandante : Questo provvedimento non deve essere adottato con leggerezza, e se un primo ufficiale solleva il suo capitano dal comando, dovrà dimostrare in seguito dinanzi a una Commissione della Flotta Stellare che tale azione era giustificata e necessaria.
- Capitolo 4.5 CO
Ufficiale comandate , è l´ufficiale più alto in grado presente sul unita che comanda. obbligatoriamente deve essere della sezione comando e navigazione , il suo dovere e servire la federazione e proteggere il suo equipaggio e la nave anche a costo della sua stessa vita.
Note: indipendentemente dal grado e dal ruolo che si ricopre i plancia ogni membro deve continuamente ed in ogni occasione fornire suggerimenti al capitano in modo che lui possa avere sempre una rosa di possibili scelte .
- Capitolo 4.6 Le manovre d’emergenza
Le manovre di emergenza sono 3 arresto d’emergenza , virata d’emergenza , inversione d’emergenza queste 3 manovre sono attivabili dalla consol di navigazione tramite un semplice comando che permette di scegliere quale delle 3 manovre si vuole attivare , tuttavia sulla consol ce anche un indicatore di stress che il timoniere deve verificare prima di procedere in quanto ogni manovra comporterà un aumento dello stress strutturale ( da non confondersi con integrità strutturale) del 25 % più e alto lo stress sullo scafo maggiori sono le possibilità di una microfrattura sullo stesso e quindi e maggiore la possibilità di un fallimento della manovra , le cause che determinano lo stress sono principalmente gas stellari , armi , anomali spaziali.
- Arresto d’emergenza: tale manovra comporta utilizzo concimato dei motori ad impulso motori di manovra e inversione dei motori a curvatura permettendo all’unità di fermarsi in pochi attimi , manovra estremamente utile quando si rischia una collisone ed la normale procedura di arresto non sarebbe in grado di evitarla.
- Virata d’emergenza: questa particolare manovra permette all’unita di effettuare la virata standar di 90° ma in modo estremamente veloce .
- Inversione d’emergenza: con questa particolare manovra unita compie una inversione di 180° in pochissimi secondi , cambiano quindi la posizione da poppo a prua dell’unita.
Capitolo 05
- Capitolo 5.1 Deflettore di navigazione.
Il defletore di navigazione
La funzione del deflettore di navigazione sulle navi e di bloccare tutte quelle particelle che si trovano nello spazio , e che in caso di collisione con lo scafo della nave creerebbero notevoli hanno rendendo in pratica impossibile il viaggio a velocità curvatura.
Il deflettore si basa su una tecnologia di gravitoni polarizzati , precisamente dei generatori rindondantiche amplificano la distorsione del campo subspaziale .
Il sistema e composta da una serie di generatori , delle potenti bobine di distorsione di campo che servono a dirigere ed focalizzare l’energia prodotta ad una serie di scudi parabolici , che sono in grado di allontanare dalla rotta della nave tutti gli oggetti del diametro inferiore ad un metro, tuttavia e anche possibile concentrando tale raggio deviare oggetti piu grandi .
Funzionamento
Il flusso di gravitoni viene inviato al distorsore di campo che li proietta all'esterno della nave. Il distorsore crea due campi principali: uno, a circa 2 chilometri davanti alla nave, a bassa energia in grado di fermare atomi e particelle subatomiche, l'altro, a poche centinaia di metri dallo scafo, serve per deviare le micro meteore e le particelle che hanno attraversato il primo campo.
In pratica tutto quello che viene a contatto con il campo deflettore incomincia a scivolare sul campo stesso fino a quando non viene lasciato dietro la nave.
Il deflettore non ha alcun'influenza sui phaser o su corpi relativamente grandi (oggetti di oltre un metro di diametro possono sfuggire ai deflettori). Sulle navi della Federazione i deflettori sono delle grandi porzioni concave di scafo posizionate in modo da avere visuale libera in fronte alla nave; di solito sono posizionati davanti alla sezione ingegneria e spesso sono abbinati ad un gruppo di sensori.
- Capitolo 5.2 Le boe temporali
Durante il viaggio, è essenziale che i computer siano in grado di calcolare la velocità con estrema accuratezza per determinare la posizione e la velocità della nave. Tutto questo e possibile grazie a un´estesa rete di boe temporali, le navi della Federazione possono ottenere valori temporali assoluti con i quali calcolare la velocità.
Quando un vascello non è in contatto con una boa, i processori temporali di bordo registrano il tempo trascorso sulla nave, che tuttavia è soggetto a fenomeni di distorsione temporale causa della velocità subluce ,.non appena possibile, la nave si sincronizza con una boa temporale.
La distorsione dei tempo è particolarmente evidente a elevate velocità di impulso, ma i subprocessori di guida e di navigazione della nave riescono a compensarla egregiamente. Quando calcolano una rotta, i vascelli della Flotta Stellare inseriscono un piano di volo che eviti oggetti pericolosi lungo il percorso, come stelle o altri corpi solidi. Durante il viaggio, i computer viene aggiornano continuamente i loro piani di volo, apportando correzioni di rotta man mano che si rendono disponibili nuove informazioni.
Tesi redatta da
- Bobking , grado recluta sezione comando e navigazione.
- Connor , grado marinaio di 2 classe comando e navigazione.
Recluta - Comando e Navigazione Bobking
+ [SECLAR 1] - File ID: 9801 - Ultima Modifica File: 31/10/2377 11:47 - Data Stellare: 54830.93 - Autore: Sog
Tesi su manovre navali relative al combattimento e alla difesa.
Premessa: I compiti del timoniere .
----------------- Tesi di ETHANIEL SOG -----------------------------
PREMESSA : I compiti del timoniere .
La postazione del timone è utilizzata per il pilotaggio e il controllo vero e proprio della navigazione della nave.
Il timoniere ha 5 principali aree di responsabilità:
1) Riferimenti di navigazione/tracciamento della rotta.
2) Supervisione delle operazioni automatiche di volo.
3) Operazioni manuali di volo.
4) Verifica della posizione.
5) Ufficiale di collegamento tra la plancia e la sezione ingegneria.
Durante il volo a velocità di impulso, il timoniere è responsabile per il monitoraggio degli effetti della relatività e
dello stato del sistema di smorzamento inerziale.
nel caso in cui una manovra richiesta superi i limiti di capacità del sistema di smorzamento inerziale, il computer
richiederà al timoniere di modificare il piano di volo per riportarlo nei limiti di prestazione consentiti.
Durante lo stato di Allarme, il regolamento di volo consente al Timoniere di compiere manovre che possono
essere potenzialmente pericolose per l'equipaggio o la nave.
Il regolamento operativo per il volo a velocità curvatura richiede che il timoniere tenga sotto controllo la
geometria del campo subspaziale in parallelo con la sezione ingegneria.
Durante il volo curvatura la consolle aggiorna continuamente i dati dei sensori a lungo raggio e
opera correzzioni di rotta in automatico.
Data l'importanza della postazione del timone, essa è collegata ad un subprocessore di riserva dedicato alle
operazioni di volo, che dà la possibilità al Timoniere di pilotare manualmente la nave. Questo gruppo di apparati
include sensori di navigazione di emergenza.
SEZIONE PRINCIPALE : Manovre e tattiche di difesa e di offesa .
- Tre Movimenti Fondamentali
Qualunque evoluzione eseguita da una nave può essere ricondotta ad una combinazione in parte semplice dei tre
movimenti fondamentali che può compiere intorno ai suoi tre assi longitudinale, trasversale e verticale,
i quali si incontrano sempre perpendicolarmente l’uno con l’altro nel baricentro della nave.
Il movimento intorno all’asse longitudinale, con il quale il caccia si inclina
alzando e abbassando le gondole, è detto di rollio.
Un rollio completo è definito “tonneau”.
Il movimento intorno all’asse trasversale, con il quale la nave alza e abbassa
la prua, in pratica cabra e picchia, è detto di beccheggio.
Quello intorno all’asse verticale, con il quale la nave sposta la prua a destra
e a sinistra, è detto invece di imbardata.
Il movimento attorno ai tre assi è controllato dai propulsori di manovra.
Questi dispositivi sono posizionati sul ventre, sul dorso e sui lati dello scavo e permettono alla nave di muoversi
nella direzione opposta a quella dove è azionata la spinta.
Per aumentare la distanza che vi separa da un aggressore, disimpegnandosi
quindi temporaneamente dallo scontro, si deve evitare di virare se possibile,
usare la massima velocità e spostarsi con brevi salti Warp della durata
inferiore a 5 secondi. Una virata di frenata può essere invece una manovra sia difensiva
che offensiva. Significa eseguire una brusca virata per ottenere un rapido
cambiamento di direzione.
Viene definita “chandelle” una larga virata di 180° di rotazione eseguita con una lieve cabrata. Si utilizza quando si ha
un nemico in coda e si decide di affrontarlo.
La “virata Immelmann” è invece una cabrata eseguita fino a mezza gran volta,
con successivo mezzo tonneau per raddrizzare la nave.
La “gran volta” o “loop” è un giro completo della nave sul piano
verticale ottenuto mantenendo il caccia in un angolo di cabrata costante.
Questa manovra viene utilizzata per togliersi dalla coda di un nemico. Una variante arricchita del loop è l’ “otto cubano”.
Per finire, il “Barrel”. Questa semplice manovra è utilizzata per evitare un siluro all’ultimo momento, per togliersi dalla
linea di tiro, o portarsi in coda con una forte diminuzione di spinta.
----------------------- MANOVRE NAVALI DI DIFESA E DI OFFESA -----------------
--Manovre prettamente difensive:
- Split-s: eseguire un mezzo loop in picchiata;
- Break turn: in definitiva una stretta virata.
--Manovre prettamente offensive:
- Barrell roll: rotazione in torno al proprio asse centrale compiendo una spirale;
- Pursuit roll: utilizzato per prevenire una virata dell´avversario, consiste nell´effettuare una cabrata seguita da una
rotazione di 180° e di un mezzo loop circa
- Sandwitch: manovra che consiste nel trarre in inganno l´avversario tramite
un turn roll prima ed una in place turn dopo
- Fishhook: calcolare la nuova direzione, impostare una rotta che si trova a 180°
rispetto alla direzione che si intende prendere,
quindi effettuare in modo repentino una virata di 180° nella direzione
impostata inizialmente
- Hard Brake: ridurre la velocità il più velocemente possibile. più l´arresto è effeuttuato
in maniera rapida ed accentuata,meno probabilità ci saranno che l´avversario
riesca a fare altrettanto, in questo modo da una posizione di svantaggio con
un nemico alle spalle si passa ad una posizione di vantaggio
con capacità di fuoco delle armi principali
- Kickstop: effettuare una virata stretta di 90° in qualunque direzione e
mantenerla per alcuni istanti. se l´avversario riesce a seguire la manovra
effettuare una inversione di 180° ed aprire il fuoco
- Roll: avvicinarsi all´obiettivo mentre si esegue una rotazione lungo il proprio asse
- Shake: altrimenti chiamata Zig-Zag. effettuare una manovra evasiva
da una parte all´altra di 45° mentre si procede ad avvicinarsi all´obiettivo
- Sit-´n´-Kick: una manovra evasiva specialmente utile contro grandi navi.
Consiste nell´effettuare una virata di 90° verso qualsiasi direzione.
Spegnere i motori e girarsi verso l´obiettivo aprendo il fuoco,
quindi effettuare un´altra virata di 90° ed attivare i motori al massimo
- Sit-´n´-Spin: azzerare la potenza di spinta ed effettuare una rotazione di 360°,
sparando su qualunque obiettivo all´interno degli archi di fuoco delle armi.
Una volta raggiunta la direzione originale riattivare i motori e continuare
- Tight Loop: effettuare una virata stretta in qualunque direzione a quanto non si ritorna alla stessa direzione iniziale.
correttamente effettuata, questa manovra consente di mettersi in coda agli avversari, o almeno liberarsi di questi
sulla propria coda per alcuni momenti.
---------------------Combattimento Navale-------------------------------
Introduzione: uno dei compiti più delicati e difficili di un timoniere è quello di pilotare la nave in situazione di combattimento.
Ovviamente la preparazione è fondamentale; conoscere le manovre e le tattiche di base rende il compito meno arduo,
tuttavia le capacità fondamentali per avere successo sono essenzialmente due:
1) Istinto: spesso il combattimento risulta essere un´azione molto frenetica. Il susseguirsi degli eventi può essere talmente
rapido da non lasciare spazio alla ragione pura e semplice. Il timoniere potrebbe essere chiamato quindi a prendere decisioni
in un tempo estremamente ristretto;
2) Esperienza: l´aver partecipato a numerosi azioni di combattimento, ed essersi addestrato con impegno, aumentano
non di poco le possibilità di successo. Inoltre una buona esperienza aiuta ad evitare l´indecisione, che talvolta può essere
ancor più pericolosa di una manovra sbagliata.
In caso di imminente scontro timoniere deve:
-Monitorare lo stato della navigazione: precisione della rotta e delle coordinate di destinazione e correggere eventuali errori:
la conoscenza del luogo in cui si combatte è fondamentale per la vittoria;
-Tenersi aggiornato sullo stato della nave: conoscere i punti di forza e i punti deboli della propria nave è
fondamentale per elaborare una strategia di combattimento valida;
-Controllare la presenza di altre navi: il timoniere dovrà sempre annunciare la presenza di altri vascelli
all´ufficiale in comando;
-Interfacciarsi con la consolle tattica: in questo modo nella consolle NAV verranno visualizzate le informazione sullo
status della propria nave e della/e nave/i nemica/e.
Manovra di avvicinamento
Durante tale manovra il timoniere è tenuto a:
-Tenere conto delle specifiche della propria nave: punti forti e deboli;
-Lavorare assieme all’ufficiale tattico e scientifico per raccogliere informazioni sul vascello nemico:
ciò aiuterà l´equipaggio ad elaborare strategie offensive e/o difensive efficaci;
-------------------------------COMPITI DEL TIMONIERE IN CASO DI COMBATTIMENTO ------------------
-Rapporto DISTANZA/PRECISIONE: il timoniere dovrà cercare di trovare il giusto compromesso tra
DISTANZA dal bersaglio e PRECISIONE delle armi. Ovviamente, più il bersaglio sarà
vicino alla propria nave, più sarà facile per l´ufficiale tattico riuscire ad
agganciarlo e a colpirlo. Tuttavia bisogna tenere a mente che una distanza
eccessivamente ravvicinata,rende estremamente difficile anticipare e/o neutralizzare
una contromossa nemica. Ad esempio, mettiamo che vi troviate a poppa del vostro
nemico ad una distanza media. Se questo dovesse cercare di ribaltare la situazione con un arresto di
emergenza, voi quasi sicuramente avrete tutto il tempo di rallentare e mantenervi a poppa del vostro avversario.
Ma se doveste essere troppo vicini, la vostra reazione non sarà sufficientemente veloce e potreste ritrovarvi
improvvisamente col nemico a poppa (una situazione assai spiacevole).
Durante il combattimento è sempre consigliabile quindi
mantenere una velocità non troppo elevata, in modo tale che le vostre
virate risultino più efficaci, e vi sia più facile
reagire alle contromosse del vostro avversario.
-Quando si è in vantaggio:
Si è in vantaggio quando la vostra nave ha i propri archi di fuoco puntati su punti particolarmente vulnerabili
della nave nemica. Bisogna cercare di mantenerlo a tutti i costi, senza però essere troppo avventati e permettere
al nemico di ribaltare la situazione. E´ importante tenere a mente anche il fattore psicologico; il fatto di
avere una nave nemica alle calcagna può rendere nervosi i vostri avversari e spingerli all´errore.
-Quando si è in svantaggio:
Si è in svantaggio quando la nave nemica ha la possibilità di colpirvi nei vostri punti deboli. In questo caso è vitale
mantenere i nervi saldi e non lasciarsi condurre in errore. Se possibile bisogna cercare di rovesciare la situazione
trasformando lo svantaggio in vantaggio. Quando non è possibile bisogna fare di tutto per disimpegnarsi e riportare
la situazione in equilibrio, per poi ricominciare d´accapo con le manovre offensive. Non esistono regole specifiche
per fare ciò, se per esempio la vostra nave è più veloce potete pilotare a massima velocità evitando il fuoco nemico
fino a portarvi fuori portata, o se è più agile cercare di farlo avvicinare troppo in modo da ribaltare la situazione
con una brusca manovra di emergenza, ma anche in questo caso le situazioni sono diverse l´una dall´altra.
--Conosci il tuo nemico--
Conoscere i punti di forza e di debolezza del proprio avversario è fondamentale, ma non sempre possibile.
In generale però si può dire che la parte più resistente di una nave nemica è la prua, mentre la più debole è
quella dove si trova la sezione motori (in genere a poppa). Altre zone come il ventre o il dorso possono essere
più vulnerabili non perchè siano di per sè meno resistenti, ma perchè di solito sono coperte da un armamento
di potenza assai inferiore rispetto a quello presente a prua o a poppa.
-Navi Borg: importante eccezione sono le navi borg. La maggior parte di esse sono di forma geometrica regolare
(sferica o cubica perlopiù) e sono sprovviste di determinate sezioni come tutte le altre navi, ma hanno i loro
sistemi sparsi un pò ovunque e in maniera ridondante. In pratica, tali vascelli non hanno punti deboli su cui
cercare di concentrare il fuoco. Molto spesso, di fronte a questo avversario, l´unica speranza è nella fuga...
a meno che non si disponga di una flotta particolarmente numerosa.
Capo Senior - Comando e Navigazione Sog
Tesi - MANOVRE DI COMBATTIMENTO NON CONVENZIONALI
====================================================================================
Premessa
Nel corso della storia migliaia di capitani della flotta stellare si sono trovati nelle più disparate situazioni di combattimento, nelle quali ovviamente è fondamentale avere una grande esperienza nel combattimento, ma spesso anche una notevole inventiva e capacità d'improvvisazione per sfuggire alle più pericolose insidie.
Durante la storia della flotta stellare sono quindi state usate manovre decisamente non convenzionali, a causa dell'alto rischio presentato dall'esecuzione della manovra, che non vengono insegnate nel corso degli studi sebbene se ne conservi un'adeguata documentazione, nel caso un giorno si possano rivelare utili per una seconda volta. Alcune di queste, meno rischiose ma ugualmente originali, prendono il nome dal capitano o dall'ufficiale che le ha ideate e/o applicate la prima volta (v. "Manovra Picard", "Manovra Riker" e " Manovra Tuvok") altre ancora sono talmente rischiose da non essere state mai più utilizzate.
Scopo di questa tesi è llustrare e descrivere le manovre più rischiose al fine di renderne evidenti la genialità e l'utilità in battaglia.
====================================================================================
La gravità per viaggiare nel tempo
Nonostante i notevoli progressi raggiunti nella tecnologia dei viaggi interstellari, la Federazione Unita dei Pianeti è estremamente cauta riguardo ai viaggi nel tempo. I metodi conosciuti sono pochi e rischiosi, ma a volte è stato necessario correre dei rischi.
Situazione
L'idea sembra piuttosto ardita: dirigersi dritto verso la stella più vicina o un potente campo gravitazionale, alla massima velocità. Un buco nero sarebbe l'ideale, ma il suo campo di gravità comporta il rischio di restare intrappolati. D'altra parte, una stella potrebbe incendiare una nave che si avvicina troppo. Attraverso caute manovre è comunque possibile sfruttare al meglio l'effetto fionda attorno alla stella o al buco nero, ottenendo l'aumento di velocità necessario per raggiungere la curvatura temporale.
Anche se il risultato finale è diverso, lo stesso principio veniva impiegato dagli scienziati della NASA del pianeta Terra nel XX secolo per lanciare i primi veicoli spaziali a grandi distanze in minor tempo, sfruttando la gravità del sole. Alcuni di questi primi viaggi permisero l'esplorazione dei pianeti del loro sistema solare. Nel XXIII secolo, sebbene l'impresa risulti ancora in parte imprevedibile, questo sistema è il più sicuro per viaggiare nel tempo. Infatti, per molti anni, è rimasto l'unico modo conosciuto per rompere la barriera del tempo attraverso una combinazione di velocità e calcoli.
Richiede un computer estremamente preciso e potente, in grado di elaborare alcune complesse variabili addizionali.
Il punto di stacco è la variabile più critica, e cambia a seconda delle dimensioni della nave e della natura della fonte di gravità. Il punto di stacco non è sempre lo stesso. Inoltre, calcolare male il momento in cui la nave deve fermarsi potrebbe distruggere il vascello o scaraventarlo in un'epoca sconosciuta. Questa manovra assomiglia più a un'arte che a una scienza esatta.
Per viaggiare attraverso il tempo bisogna accellerare la nave a velocità superiori a quelle normalmente consentite dai motori. L'unico metodo conosciuto utilizza una gravità estrema, generata da una stella o da un buco nero, per lanciare la nave oltre la barriera del tempo.
* Selezione della fonte
lnnanzitutto, la nave deve individuare una fonte di alta energia. Le due opzioni disponibili sono un buco nero o una stella, anche se entrambe presentano alte percentuali di rischio
* Avvicinamento
Mentre il vascello si avvicina alla stella o al buco nero, i calcoli vengono eseguiti con accuratezza. Altrimenti la nave potrebbe restare intrappolata nel buco nero o essere incenerita dal sole.
* L'effetto fionda
Girando attorno al centro della stella o del buco nero, dove la gravità è più elevata, la nave viene spinta via con grande violenza e rischia di essere totalmente distrutta.
* La barriera del tempo
La nave viene lanciata lontano dalla stella a incredibile velocità rompendo la barriera dello spazio-tempo e viaggiando a ritroso. Questa manovra può essere utilizzata per il ritorno.
===================================================================================
Rimbalzare contro l'atmosfera
Questa manovra non è una procedura standard; viene 'inventata' nel 2365 dal capitano Picard, quando deve ideare una strategia in pochi secondi. Il campo di integrità strutturale della navetta rende possibile la manovra, senza di esso la navetta verrebbe gravemente danneggiata dalle sollecitazioni coinvolte.
Un pilota inesperto è fuggito su una navetta dell'Enterprise progettando di cercare fortuna altrove. In ogni caso ha destabilizzato la reazione del dilitio perdendo l'energia principale. La navetta è diretta verso un pieneta vicino dove rischia di bruciarsi al contatto con l'atmosfera.
Fattori
Piano
* Utilizzare i propulsori di manovra e impostare la rotta verso il pianeta.
* Aumentare la velocità e alterare la traiettoria in modo che la navetta colpisca l'atmosfera rimbalzando via.
In data stellare 41416 la U.S.S. Enterpríse NCC-1701-D si trova nell'orbita dei pianeta Relva VII, dove Wesley Crusher e altri tre candidati stanno per cimentarsi nell'esame di ammissione all'Accademia della Flotta Stellare.
Jake Kurland, deluso per non essere nemmeno stato ammesso all'esame, ruba una navetta per fuggire su Beltane IX, dove ha intenzione di imbarcarsi su una nave da carico.
Rotta mortale
Il fatto che Kurland abbia rubato una navetta di proprietà della Flotta Stellare è un problema secondario rispetto a quanto accade all'inesperto ragazzo, che destabilizza involontariamente la reazione del dilitio che alimenta i motori. Il vascello perde l'energia principale e rimane solo con i propulsori di manovra. La navetta viene intrappolata dal campo gravitazionale di Relva VII.
L'ingegnere Capo La Forge ritiene che Kurland sia destinato a colpire l'atmosfera di Relva VII e a bruciare ad un'altitudine di 200 chilometri. La navetta di Kurland è fuori dal raggio dei teletrasporto e dei raggi traenti. L'equipaggio dell'Enterprise sembra completamente impotente.
Entro 78 secondi la navetta entrerà nell'atmosfera, mentre solo 50 secondi sono necessari per consentire al nucleo di raffreddarsi prima che i motori possano essere riaccesi.
Quando a Kurland restano appena 30 secondi, Data afferma che perfino se fosse in grado di riavviare i motori, la navetta non avrebbe spinta sufficiente per sfuggire alla gravità del pianeta. Determinato a salvare la vita di Kurland, il Capitano Picard studia velocemente una soluzione innovativa al problema.
Picard ordina a Kurland di seguire alla lettera le sue istruzioni. Il giovane ha difficoltà a obbedire al comando di dirigere la navetta direttamente contro il pianeta sottostante. Una manovra del genere sembra infatti un suicidio, ma Picard è irremovibile, e quando mancano 28 secondi all'impatto, Kurland altera la rotta.
A questo punto, quando la velocità è esattamente 0,020, il Capitano Picard ordina al giovane di ravviare i motori. Kurland esegue, ma ormai mancano solo 6 secondi all'impatto con l'atmosfera. I motori ripartono, e all'ordine di Picard Kurland effettua una cabrata decisa.
A parte qualche scossone, la velocità e la traiettoria permettono alla navetta di rimbalzare contro l'atrnosfera del pianeta anziché penetrarla. La navetta ritorna sana e salva sull'Enterprise, e il giovane Kurland si presenta al Comandante Riker per un'udienza disciplinare. Il suo futuro tra i ranghi della Flotta Stellare rimane alquanto incerto.
====================================================================================
Manovra dello scudo solare
Situazione
Vi trovate fuori dallo spazio federale, vicino ad una base Borg. I vostri ordini sono di ritornare nello spazio della Federazione attraverso un condotto di transcurvatura, ma diversi ufficiali anziani sono intrappolati sul pianeta con i Borg.
Fattori
*
La nave Borg è molto più potente della vostra. In un combattimento diretto avreste la peggio.
*
La U.S.S. Enterprise è già stata danneggiata: gli scudi convenzionali sono al 62 %.
*
Lo scafo dell'Enterprise può sopportare una temperatura di 12'000 gradi centigradi. A temperature più alte, la nave verrà distrutta.
Piano
*
Utilizzare gli scudi metafasici sperimentali per portare la nave nella corona di una stella vicina. Gli scudi vi proteggeranno e l'alta temperatura impedirà ai Borg di seguirvi.
*
Una volta nella corona, modificare gli emettitori del raggio traente per sparare un raggio di particelle, in modo da generare un'eruzione solare che annienterà la nave Borg.
Informazioni
*
Gli scudi metafasici utilizzano c
Propulsione a Curvatura
La propulsione a curvatura (warp drive nell'originale inglese) è il tipo di propulsione che permette alle navi stellari di viaggiare ad una velocità superiore a quella della luce.
L'enorme quantità di energia necessaria a raggiungere la velocità di curvatura si ottiene dal reattore materia/antimateria (MARA), attraverso una reazione controllata tra le due regolata attraverso i cristalli di Dilitio. I motori a curvatura creano una distorsione spaziotemporale attorno all'astronave formando attorno ad essa forze contrapposte che curvano lo spazio-tempo fino a permettere al mezzo di saltare nell'iperspazio e raggiungere la destinazione in minor tempo.
I motori a curvatura sostanzialmente contraggono lo spazio davanti all'astronave e lo dilatano dietro di essa. Si immagini un elastico fissato tra due chiodi e una formica che cammini sopra di esso. Se l'elastico non viene manipolato, la formica, per andare da chiodo a chiodo, dovrà camminare per un tragitto equivalente alla lunghezza dell'elastico. Se invece lo si accorcia davanti alla formica e lo allunga dietro di essa, seguendola nel suo spostamento, come risultato si otterrà che la formica sarà andata da chiodo a chiodo camminando per un tragitto inferiore alla lunghezza complessiva dell'elastico, benché localmente non avrà rilevato nessuna modifica dell'elastico. [citazione necessaria]
Storia
il primo motore a curvatura terrestre venne costruito nel 2063 dal dott. Zefram Cochrane. Il primo viaggio spaziale a velocità di curvatura innescò anche il primo contatto della Terra con una civiltà extraterrestre, quella vulcaniana. All'epoca, difatti la prassi vulcaniana era di contattare un pianeta solo dal momento in cui esso disponesse della propulsione a curvatura, sicché quando un'astronave vulcaniana di pattuglia rilevò il volo del prototipo terrestre, i Vulcaniani atterrarono sul pianeta.
Fattore di Curvatura
La velocità di un'astronave a propulsione di curvatura è misurata dal fattore di curvatura (warp factor).
La scala è logaritmica è strutturata in modo che al fattore 1 corrisponda la velocità della luce (c) ed al fattore 10 corrisponda velocità infinita.
WARP FACTOR ----- X C ----- VELOCITA'
Warp 1 ----- 1 c ----- 3,0x105 km/s
Warp 2 ----- 10,079 c ----- 3,0x106 km/s
Warp 3 ----- 38,941 c ----- 1,2x107 km/s
Warp 4 ----- 101,59 c ----- 3,0x107 km/s
Warp 5 ----- 213,75 c ----- 6,4x107 km/s
Warp 6 ----- 392,50 c ----- 1,2x108 km/s
Warp 7 ----- 656,13 c ----- 2,0x108 km/s
Warp 8 ----- 1.024 c ----- 3,1x108 km/s
Warp 9 ----- 1.516,4 c ----- 4,5x108 km/s
Warp 9,2 ----- 1.649 c ------ 4,9x108 km/s
Warp 9,6 ----- 1.909 c ----- 5,7x108 km/s
Warp 9,9 ----- 3.053 c ----- 9,2x108 km/s
Warp 9,9753 ----- 6.000 c ----- 1,8x109 km/s
Warp 9,99 ----- 7.912 c ----- 2,3x109 km/s
Warp 9,9999 ------ 199.516 c ----- 6,0x1010 km/s
Warp 10 ----- infinita ----- (A Warp 10 un oggetto potrebbe occupare tutti i punti dell'universo contemporaneamente)
-La formula per calcolare il rapporto tra la velocità della luce c e la velocità warp vW fino a warp 9 è:
c = vW(10 / 3)
-Per velocità superiori la formula si fa più complessa:
c = vW(((10 / 3) + a * ( − Ln(10 − WF))°n) + f1 * ((WF − 9)5) + f2 * ((WF − 9)°11))
(i valori preceduti da ''°'' sono esponenziali)
Dove a = 0,00264320; n = 2,87926700; f1 = 0,06274120; f2 = 0,32574600;
Quadranti Galattici:
La nostra galassia (Via Lattea), è suddivisa convenzionalmente in quattro quadranti galattici, a loro volta suddivisi in settori:
- α (quadrante alfa)
- β (quadrante beta)
- γ (quadrante gamma)
- δ (quadrante delta)
LINK
-Quadrante Alfa:
È localizzato tra le ore 9 e 6, supponendo di visualizzare la galassia come un orologio ruotante in senso antiorario. In questo quadrante vi è la sede della Federazione dei Pianeti Uniti, dell'Unione dei Cardassiani, dei Bajoriani, dell'Alleanza Ferengi e della Confederazione dei Breen. Secondo questa suddivisione la Terra si trova esattamente lungo il confine tra quadrante alfa e beta, a circa metà strada dal centro della Via Lattea.
-Quadrante Beta:
È localizzato tra le ore 6 e 3, la Terra e la Federazione dei Pianeti Uniti sono sul confine tra i quadranti Alfa e Beta. In questo quadrante vi è la sede dei Klingon, dei Romulani, dei Vulcaniani, dei Gorn, dei Son'a e dei Metron. Si deve notare che sia i Romulani che i Klingon si estendono anche in una parte di quadrante Alfa.
-Quadrante Gamma:
È localizzato tra le ore 12 e le 9, è la sede del Dominio, (e del tunnel spaziale che porta al quadrante Alfa), che esercita una sorta di controllo dell'intero quadrante. Gran parte di questo quadrante risulta inesplorata.
-Quadrante Delta:
Si trova tra le ore 3 e le 12. È la sede dei Borg (che dominano il quadrante), dei Kazon, dei Vidiani, dei Talassiani, degli Ocampa, degli Hirogeni e di basi coloniali della Specie 8472. Gli unici dati che abbiamo su questo quadrante vengono dalla USS Voyager, che è stata accidentalmente trasportata lì e ha esplorato quel quadrante per sette anni.
Considerando che la Via Lattea ha un diametro pari a circa 100.000 anni luce, se ne deduce che ogni quadrante ha un diametro di circa 50.000 anni luce. Inoltre, ogni quadrante è suddiviso in settori del diametro di circa 20 anni luce.
Si può avere un riscontro della divisione politica della galassia nella figura seguente; le potenze più importanti sono il Dominio, i Borg, i Klingon, i Romulani e la Federazione dei Pianeti Uniti.
Capo Senior - Comando e Navigazione Jax
PROCEDURE e MODALITA’ DI VOLO
1. MODALITA’ DI CROCIERA : Su tre turni di cui solo uno operativo
a) All’inizio di ogni turno si eseguono una serie di test di diagnostica di livello 4.
b) Se la nave sta operando a velocità di curvatura si portano i sensori a lungo raggio alla massima efficienza
operativa e si tengono quelli a corto raggio in stand by.
c) Il deflettore di navigazione è sempre attivato.
d) I sistemi tattici si trovano ad un livello operativo del 40% della potenza nominale
e) Un hangar navette viene tenuto in prontezza.
2. MODALITA’ ALLARME GIALLO : Un turno operativo, uno in prontezza, uno fuori servizio
a) All’inizio di ogni turno si eseguono una serie di test di diagnostica di livello 4.
b) Se disattivato, il propulsore di curvatura, viene portato al 20% della potenza nominale.
c) Il motore ad impulso viene portato al 100% della potenza nominale.
d) Tutti i sistemi secondari vengono posti in stand by.
e) I sensori tattici operano all’80% della potenza nominale.
f) I sistemi tattici operano al 85% della potenza nominale.
g) Due hangar navette sono tenuti in piena operatività.
h) Vengono attivati i sensori interni di sicurezza e poste in stato di allerta le squadre della sicurezza.
i) Si effettua un test di livello 5 sui sistemi di sopravvivenza.
3. MODALITA’ ALLARME ROSSO : Un turno operativo e due in stand by
a) Si effettua un test di livello 4 su tutti i sistemi, ogni 5 minuti.
b) La propulsione a curvatura viene posta al 75% della potenza nominale e su tutti i sistemi propulsivi si effettua
un test diagnostico di livello 3
c) L’impulso viene portato al 100% della potenza nominale.
d) I sensori tattici operano al 100% della potenza nominale.
e) Tutti i sistemi tattici operano al 100% della potenza nominale e su di essi si effettua un test diagnostico di
livello 3.
f) Tutti gli hangar vengono tenuti in piena operatività.
g) Squadre della sicurezza vengono disposte nei punti strategici del vascello.
h) Si effettua un test di livello 4 sui sistemi di sopravvivenza.
i) Le paratie di isolamento e i campi di forza vengono attivate in tutto il vascello.
4. MODALITA’ DI SUPPORTO ESTERNO - ATTRACCO
a) Tutti i sistemi primari vengono disattivati.
b) L’energia e il supporto vitale necessari alla nave vengono direttamente forniti dalla base stellare tramite
passaggi rigidi e connessioni ombelicali.
c) Vengono lasciati attivi solo i generatori secondari.
5. MODALITA’ A POTENZA RIDOTTA
a) Su tutti i sistemi si effettua un test diagnostico di livello 5 al fine di avere un dettagliato rapporto sul reale
fabbisogno di energia dei sistemi del vascello.
b) A meno che non sia l’unica propulsione rimasta, viene disattivata la propulsione a curvatura.
c) La propulsione ad impulso viene ridotta al minimo della potenza nominale.
d) Gli smorzatori inerziali e il campo di integrità strutturale vengono posti al minimo e solo un generatore viene
lasciato attivo.
e) L’uso dei sensori per missioni secondarie è severamente proibito.
f) Il deflettore opera al livello minimo.
g) I sistemi tattici vengono disattivati.
h) Le operazioni negli hangar vengono sospese.
i) La sicurezza pianifica le operazioni di evacuazione.
j) Il sistema ambientale opera al 50% della potenza nominale. I compartimenti non utilizzati non devono essere asserviti.
k) Il teletrasporto non è utilizzabile.
l) L’uso dei turbo-ascensori è limitato.
m) I ponti ologrammi non sono attivi.
n) I replicatori non sono operativi. Si utilizzano le razioni d’emergenza.
6. LIVELLI DI DIAGNOSTICA
Per quel che riguarda i livelli di diagnostica, di seguito l’elenco completo.
Livello 1 Richiede parecchie ore e l’impiego di molti tecnici. Il sistema deve essere sconnesso per l’esecuzione.
Livello 2 Richiede metà del tempo utilizzato per il livello 1 ma è meno efficace.
Livello 3 Richiede 10 minuti e viene effettuato solo su alcuni sistemi primari.
Livello 4 Richiede pochi secondi e viene effettuato solo su un determinato sistema in modalità automatica o manuale in base alle esigenze.
Livello 5 Si tratta di una procedura automatica per la verifica di routine dei sistemi della durata di 2,5 secondi.
VELOCITA’ A CURVATURA
(Tesi del Capo Senior Elaina Klark)
PREMESSA
Essendo io un pilota ho deciso di scrivere la mia tesi trattando un argomento che, per la sua natura, tende ad essere dato fin troppo per scontato, anche se, per la verità, esso rappresenta proprio l’inizio di quel grande viaggio che in svariati decenni ci ha concesso di creare la federazione: la velocità a curvatura. Benché in effetti sappiano di cosa si tratti, in pochi si sono soffermati ad analizzarla compiutamente, ed è proprio questo che io mi accingo a spiegare attraverso alcuni semplici punti:
1. L’ENERGIA E L’ANTIMATERIA
2. LA VELOCITA’ DI CURVATURA
3. LA STRUTTURA DEL MOTORE
Sperando che la lettura vi risulti piacevolmente interessante vi porgo distinti saluti.
L’ENERGIA: L’ANTIMATERIA
Alla ricerca di Fonti energetiche: la fusione e la fissione degli atomi
In effetti il desiderio di poter raggiungere quelle stelle allora così tanto lontane non si può dire di certo recente, anzi, esso mosse i suoi primi passi già molti secoli fa: pur tuttavia, se da un lato è vero che tale desiderio fosse già presente, d’altro lato è necessario considerare che è per molto tempo è mancato il modo di poter generare un energia sufficiente per poter coprire quelle grandi distanze che dividono i vari sistemi solari. L’utilizzo dell’antimateria è solo l’ultimo dei vari passi fatti per recuperare l’energia necessaria: prima di esso le altre alternative più promettenti sembravano essere il processo di fusione e di fissione degli atomi.
1. Fusione
La fusione è un fenomeno riscontrabile naturalmente, in quanto è quel un processo nucleare che alimenta le stelle e che consiste dunque nell'unione dei nuclei di due atomi leggeri, corrispondenti in isotopi dell'idrogeno (deuterio e trizio), in uno più pesante. In questo tipo di reazione si riscontra che il nuovo nucleo costituito ed il neutrone che ne viene liberato hanno una massa totale minore della somma delle masse dei reagenti, la differenza è proprio la conseguente liberazione di un'elevata quantità di energia. Per poter spingere a fondere atomi di idrogeno in maniera controllata all'interno di un reattore o, più in generale, di una camera, il combustibile deve essere innanzitutto confinato spazialmente attraverso opportune tecniche, al fine di conferire ad esso le caratteristiche fisiche ideali espresse nel criterio di Lawson. L'energia potenziale totale di un nucleo è notevolmente superiore all'energia che lega gli elettroni al nucleo e pertanto l'energia rilasciata nella maggior parte delle reazioni nucleari è notevolmente maggiore di quella delle reazioni chimiche.
2. Fissione

La fissione nucleare è una reazione nucleare in cui il nucleo di uranio 235, plutonio 239 o di altri elementi pesanti adatti vengono divisi in frammenti tramite il bombardamento con neutroni o altre particelle elementari attraverso un processo che libera energia. In un esempio classico di fissione, il nucleo di uranio 235 assorbe un neutrone e avviene la fissione che spezza il nucleo in due frammenti e libera tre neutroni e dell'energia. Tali neutroni liberati andranno a coinvolgere altri nuclei di urano andando così a liberare a loro volta due o tre neutroni, ed innescando così una reazione a catena in cui il numero di fissioni aumentano esponenzialmente. In linea generale si può dire che nella fissione nucleare, quando un nucleo di materiale fissile (se produce fissione con neutroni di qualsiasi energia cinetica) o fissionabile (se la fissione è possibile solo con neutroni di elevata energia cinetica, detti veloci) assorbe un neutrone, si fissiona producendo due o più nuclei più piccoli e un numero variabile di nuovi neutroni. Gli isotopi prodotti da tale reazione sono radioattivi in quanto posseggono un eccesso di neutroni e decadono in una “catena di decadimenti radioattivi” fino ad arrivare ad una configurazione stabile. Il tempo di decadimento di tali elementi dipende dal tipo di nucleo prodotto e può variare da pochi milli-secondi fino a decine di anni. Per questo tutte le reazioni di fissione producono isotopi radioattivi, alcuni dei quali rimangono attivi molto a lungo, come ad esempio il plutonio: le reazioni di fissione producono molte sostanze radioattive estremamente nocive, ma mentre le scorie che provengono dai prodotti da fissione decadono in poche decadi, il plutonio resta radioattivo per un tempo che in termini umani è praticamente eterno.
L’arrivo all’antimateria
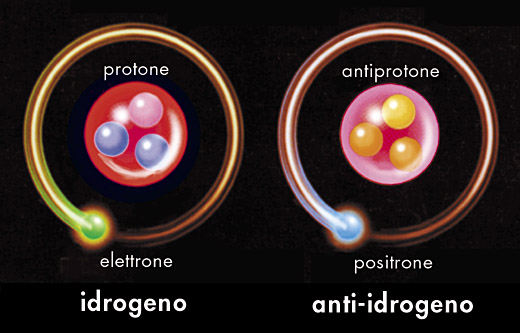
L'antimateria è la materia composta dalle antiparticelle, corrispondenti alle particelle che costituiscono la materia ordinaria. Ad esempio, un atomo di antidrogeno è composto da un antiprotone caricato negativamente, attorno al quale orbita un positrone (antielettrone) caricato positivamente. Se una coppia particella/antiparticella viene a contatto, le due si annichilano emettendo radiazione elettromagnetica: difatti l’annichilazione avviene quando una particella collide con un’antiparticella, e la conseguenza è che entrambe le particelle spariscono, e la loro massa si trasforma in energia che si manifesta con l'emissione di nuove particelle o radiazione. I possibili prodotti dell'annichilazione dipendono dal tipo di interazione che può avvenire tra le particelle iniziali e dalla loro cinematica. Quando un elettrone annichila un positrone (antielettrone) a bassa energia, il processo rende energia pura in forma di fotoni di annichilazione (si veda Annichilazione elettrone-positrone). Per comprenderne l’utilizzo è necessario partire considerando il concetto cruciale per la propulsione a curvatura: la cosiddetta formula della miscela interna. La “formula a miscela interna” è una formula matematica che determina il modo in cui la materia e l’antimateria debbano essere unite per produrre l’energia necessaria alla curvatura: il controllo di tale miscela è fondamentale, in quanto un suo squilibrio può gettare una nave stellare in un tunnel artificiale estremamente pericoloso.
Il Controllo dell’Energia: il Dilitio
Il dilitio (Dilithium) è un minerale costituito a livello molecolare da due atomi di Litio uniti ad uno di Berillio ed utilizzato come catalizzatore dell’energia, in quanto è il cuore dei reattori materia/antimateria. Risulta in particolare indispensabile per fornire la grande quantità di energia necessaria alla propulsione a curvatura delle navi stellari della Federazione Unita dei Pianeti. Infatti se è vero che l’annichilazione di materia e antimateria è un processo che produce una gran quantità di energia, è anche vero che ciò avviene in modo incontrollato: il suo sfruttamento è stato possibile solamente controllando la reazione attraverso il dilitio. I cristalli del minerale catalizzano e attivano l'annichilazione mediante un allineamento efficace dei due fasci confinati di particelle e antiparticelle: tale allineamento è seguito dalla focalizzazione all'interno del reattore. Per svolgere la catalisi i cristalli devono essere attivati in continuazione, ma ciò comporta una lenta decristallizzazione del minerale e l'esaurimento delle sue proprietà: anche un sovraccarico produce la distruzione della struttura cristallina, l'esaurimento del dilitio e un'emissione di radiazioni elevata.
LA VELOCITA’ DI CURVATURA
Il raggiungimento della velocità a curvatura
Il raggiungimento della velocità di curvatura è reso possibile dal meccanismo inventato da Zefram Cochrane della propulsione a distorsione del continuum (CDP), tale distorsione permette alle navi spostarsi nel subspazio, riducendone la massa e rendendo possibili i viaggi a grandi velocità. I motori a curvatura creano infatti una distorsione spazio temporale attorno all'astronave, formando attorno ad essa forze contrapposte che curvano lo spazio-tempo fino a permettere al mezzo di saltare nel subspazio e raggiungere la destinazione in minor tempo: i motori a curvatura sostanzialmente contraggono lo spazio davanti all'astronave e lo dilatano dietro di essa.
Comprimendo lo spazio nella direzione anteriore riduciamo la distanza dal punto di arrivo, ossia ci "avviciniamo", mentre espandendo lo spazio nella direzione opposta, invece, ci "allontaniamo" dal punto di partenza, sfuggendo al baratro gravitazionale creato davanti a noi: lo spazio compreso tra il fronte di compressione e quello di espansione è detto bolla di curvatura, e mantiene le condizioni di un qualunque sistema di riferimento in moto alla stessa velocità. Il rischio è legato prevalemente al cosiddetto “effetto di cavitazione”: per comprendere appieno quest’effetto occorre precisare che, all'interno del campo di curvatura, la costante gravitazionale assume un valore inferiore al normale, e proprio per questo la massa inerziale della nave è molto inferiore a quella posseduta in condizioni normali. La nave, tuttavia, conserva per inerzia la velocità posseduta al momento dell'ingresso in curvatura. Poiché tale velocità è di solito una frazione della velocità ad impulso (solitamente parliamo di mezzo impulso), quando la nave entra in cavitazione la spinta inizialmente posseduta fa accelerare la nave a velocità prossime a quella della luce, rischiando quindi di farle subire i noti effetti relativistici delle alte velocità (dilatazione del tempo, contrazione delle lunghezze), un po’ come se fosse diventata improvvisamente "più leggera". La propulsione a curvatura deve inoltre essere attivata in regioni di spazio quanto più vuote possibile, e ciò per una serie di ragioni.
Il fattore Curvatura
Il fattore di curvatura è l'unità di misura impiegata per calcolare le possibili velocità di un’ astronave (questa scala è stata modificata più volte). La velocità massima di una classe Galaxy è di norma curvatura 9.2, tuttavia recenti scoperte hanno evidenziato che le navi in viaggio a una velocità superiore a curvatura 5, e i cui motori non siano stati adeguatamente modificati, provocano un danno permanente al continuum dello spazio-tempo.

E’ da sottolineare che il superamento del fattore curvatura 10 in effetti sia solo teoricamente impossibile, in quanto è necessario considerare che con la tecnologia di transcurvatura Borg sarebbe possibile superare tale velocità, tuttavia il funzionamento pratico di tale tecnologia ci è ancora sconosciuta.
Formule sulla velocità a curvatura
È possibile partendo da elementi e dati certi calcolare la velocità da impiegare per raggiungere un determinato luogo entro un determinato lasso di tempo, oppure quanto tempo è necessario se si viaggia ad una determinata velocità. Tali calcoli sono possibili attraverso le seguenti formule:
1. Warp-Tempo-Distanza
warp^(10/3)+(10-warp)^(-11/3)
2. Distanza-Tempo-Warp
warp=c^(3/10)
C’è da dire che di solito questi calcoli sono svolti dal computer, tuttavia non fa male ricordarsi le formule.
LA STRUTTURA DEL MOTORE
Il motore a curvatura è in pratica il cuore di ogni nave stellare e fornisce l'energia necessaria al funzionamento di tutti i sistemi di bordo e, soprattutto, consente di viaggiare a velocità maggiori di quella della luce. Dovendo analizzare la velocità a curvatura, è necessario parlare dei vari dispositivi che permettono il suo utilizzo, e tra essi i più importanti sono:
1. Nucleo di Curvatura
2. Gondole
3. Deflettore
Nucleo di Curvatura
Il nucleo di curvatura o reattore materia/antimateria riesce a sviluppare un’energia equivalente a quella che si sviluppa all'interno di una stella tramite l’annichilimento di un atomo di materia e uno di antimateria, e sviluppando così l'energia necessaria per la propulsione di velocità curvatura. Nessun altro sistema di produzione di energia può competere con il nucleo di curvatura in termini di efficienza e di quantità di energia prodotta in modo controllato.I componenti fondamentali di un nucleo di curvatura sono:
1. Iniettori di reagenti
Sono posti alle estremità superiori ed inferiori del nucleo di curvatura e, come dice il loro nome, essi hanno la funzione di immettere un flusso controllato di materia e antimateria nei segmenti di costrizione magnetica.
2. Segmenti di costrizione magnetica
Corrispondono alla parte mediana del nucleo e si occupano di mantenere il contenimento della pressione per tutto il nucleo e l'allineamento del flusso dei reagenti, convogliandolo in modo controllato verso la camera di reazione.
3. Camera di Reazione
È il cuore pulsante della nave, ed è proprio al suo interno che i reagenti si annichiliscono formando l' Electro-plasma che permette il funzionamento dei sistemi della nave (tra i quali la stessa curvatura).
4. Condotte di trasferimento di energia (l’Electro Plasma Sistem)
Proprio come dice il loro stesso nome, esse si occupano di trasferire l’Electro Plasma in ogni sezione dell'astronave, dove tale energia servirà per ricaricare gli accumulatori e le batterie che, a loro volta, alimentano i vari sistemi.
Gondole
Una gondola di curvatura è un dispositivo capace di generare una bolla di curvatura attorno alla nave spaziale, mettendola quindi in grado di viaggiare a velocità di curvatura. Le Gondole sono strutture tubolari a sezione circolare, ellittica, o poligonale, contenenti al proprio interno un sistema di bobine di curvatura , nonché una sala di controllo. Attraverso i condotti del plasma, l'energia di curvatura derivante dal nucleo raggiunge il sistema di bobine, determinando la creazione del campo di curvatura. Lateralmente alle gondole sono posti alcuni propulsori di manovra , mentre nella parte anteriore trova alloggiamento un Collettore di Boussard.
Il collettore di Bussard è un dispositivo elettromagnetico in grado di raccogliere atomi o molecole presenti nello spazio interstellare, e di solito esso viene utilizzato per raccogliere deuterio, il quale viene utilizzato per alimentare sia i reattori a fusione dei propulsori, sia per innescare la reazione materia/antimateria all'interno del nucleo di curvatura.
Deflettore
Il deflettore principale solitamente prende la forma di un ampio disco concavocce si colloca all’estremità anteriore dello scafo della sala macchine, sotto la sezione a disco e vicino ai quattro deflettori ausiliari di riserva più piccoli, collocati sul ventre della sezione a disco stessa. La funzione principale del disco del deflettore è quella di liberare il cammino davanti all'astronave: ciò è molto importante, in quanto, mentre si procede a grandi velocità, anche se la densità della materia nello spazio è estremamente bassa, sussistono significativi rischi per la navigazione dovuti sia alle minuscole particelle micro-meteoroidi, sia agli oggetti molto più grandi come asteroidi (perfino isolati atomi di idrogeno possono danneggiare gravemente la nave).
Premessa
Questa tesi si propone di parlare della navigazione, dei compiti del timoniere, di spiegare i problemi che si possono riscontrare durante la navigazione, di scoprire come si svolge uno scontro tra vascelli e infine aggiungo alcune delle manovre che mi hanno colpito di più assieme ad una mia esperienza di volo avanzato.
1 - I Compiti del Timoniere
Non potrei cominciare questo elaborato senza parlare dei compiti del timoniere. Qui sono riassunti i doveri di un buon pilota, che sono fondamentali per il successo nella navigazione.
Per cominciare il Timoniere riceve gli ordini direttamente dall’ufficiale in comando.
I compiti fondamentali del timoniere sono 5:
1) Tracciare la rotta e aggiornare l’ufficiale in comando sullo stato della navigazione;
2) Supervisionare le operazioni automatiche di volo;
3) Eseguire operazioni manuali di volo;
4) Verificare la posizione della nave;
5) Svolgere il ruolo di collegamento tra la Plancia e la sezione ingegneria.
Questi compiti, come ho detto, sono fondamentali. Il motivo non è uno solo, ma sono molteplici; analizziamo i compiti punto per punto.
Il tracciamento della rotta è il compito fondamentale di un timoniere, perché è la cosa che sarà sempre e ripetutamente chiamato a fare durante la navigazione. Di conseguenza, dopo avere attivato una rotta, se non è attivata anche la propulsione, il timoniere dovrà inserirla, ma spesso viene riferita dall’ufficiale in comando quando dà l’ordine. I riferimenti di navigazione sono le informazioni che il timoniere è tenuto a dare all’ufficiale in comando, per fare si che egli si renda conto della situazione e possa prendere la decisione appropriata. Ogni volta che, per esempio, si verificano cambiamenti di rotta o che l’ETA viene aggiornato, è fondamentale riferirlo all’ufficiale in comando. Ovviamente questa regola vale per gli ufficiali di ogni postazione, perché, come è stato detto, il comandante possa regolarsi e prendere la decisione più giusta.
La supervisione delle operazioni automatiche di volo non è altro che la funzione del timoniere di controllare che il computer esegua le correzioni di rotta o velocità automaticamente, nel caso che si stia viaggiando in modalità automatica. Se per esempio si incontrano ostacoli durante la navigazione, come può essere un asteroide, e si è in modalità automatica, ossia, ad esempio, in tutti in quei casi in è impostata una destinazione, il computer valuterà la situazione e deciderà in quale modo intervenire; esso valuterà la pericolosità dell’oggetto e deciderà se lasciare, se possibile, che sia il deflettore di navigazione a deviarlo, o se è il caso di eseguire una correzione di rotta. I questi casi il timoniere dovrà solo controllare che il computer esegua il suo compito. Al contrario se si è in modalità di volo manuale, per esempio quando è impostata una rotta attraverso coordinate relative, sarà compito del timoniere intervenire per variare la rotta in modo tale da evitare l´oggetto e compensare. Le operazioni manuali di volo sono le manovre effettuate manualmente dal timoniere. Spesso ci si potrà trovare nella situazione di dovere pilotare manualmente; ciò può avvenire per alcune manovre in uno scontro tra vascelli oppure anche durante un decollo o un atterraggio, ma ovviamente pilotare un vascello con l’ausilio del pilota automatico è molto più semplice.
La verifica della posizione della nave è molto semplice, il controllo viene effettuato dal timoniere al fine di capire dove si trova la nave e, se sta seguendo una rotta, calcolare il punto ETA ossia il tempo che il velivolo impiegherà in base alla propulsione ed alla velocità impostata a percorrere lo spazio dalla sua posizione attuale al punto ETA. E’ sempre importante avere questa informazione e lo è soprattutto per il comandante, il quale dovrà sempre essere aggiornato.
Il ruolo di collegamento tra la Plancia e la Sezione Ingegneria è utile per ottenere lo stato dei sistemi, in particolare lo stato e la disponibilità della propulsione. Questo controllo è fondamentale nel caso in cui si opti per la propulsione a curvatura, in quanto è previsto tra i controlli pre-curvatura. Di questa parte, quindi, parlerò meglio nel paragrafo dei controlli pre-curvatura.
Inoltre tra i compiti del timoniere c’è l’importantissomo compito di controllo degli effetti relativistici che si possono verificare a velocità impulso; deve controllare inoltre il funzionamento del sistema di smorzamento inerziale.
Durante la navigazione, se il timoniere cerca di eseguire delle manovre che il sistema di smorzamento non è in grado di compensare, la CONN avvisa quest’ultimo, che sarà costretto a modificare la manovra. Durante lo stato di allarme anche le manovre potenzialmente pericolose sono concesse.
Mentre ci si trova in un viaggio a curvatura, il timoniere ha il compito di controllare la geometria del campo di curvatura, mentre la CONN esegue lievi variazioni di rotta sulla base dei dati ricevuti dai sensori.
2 - La struttura di una nave
Penso sia importante parlare anche della struttura delle unità spaziali. Queste strutture sono formate da un’ossatura primaria ed un’ossatura secondaria. La prima è costituita da un reticolato di microfilamenti di titanio e duranio; essa provvede all’integrità strutturale dell’unità. Per ridurre le vibrazioni a bassa frequenza, alla travatura principale è saldata, tramite transizione di fase, una serie di trincarini di schiuma cristallina di alluminio. L’ossatura secondaria, invece, è formata da reticoli di terminium microestruso, ai quali è fissata direttamente la struttura interna dello scafo. Le vibrazioni e i rumori, sono ridotti mediante la separazione di ossatura primaria e secondaria; questo grazie ad aste semirigide di poliduranide. E’ interessante sapere che nella ossatura primaria, sono installati diversi dispositivi; tra cui la griglia del deflettore di navigazione e i dispositivi per le comunicazioni subspaziali.
3 - I sistemi della nave inerenti alla navigazione (non propulsivi)
Tra i sistemi della nave, propulsivi e non, ce ne sono alcuni che sono fondamentali per la navigazione. Questi sono: la Consolle di Navigazione (CONN), il Sistema di Smorzamento Inerziale, Il deflettore di Navigazione, i Sensori di Navigazione.
Di seguito parlerò dei sistemi suddetti e ne spiegherò la funzione.
3.1 - La Consolle di Navigazione
La consolle di navigazione (CONN) è lo strumento fondamentale per svolgere il ruolo di timoniere. E’ infatti lo strumento da cui vengono eseguite tutte le procedure necessarie a portare a termine e buon fine una operazione di navigazione. Qui si possono eseguire le operazioni più semplici, per esempio tracciare ed attivare una rotta o inserire ed attivare una propulsione, fino ad eseguire operazioni più complesse, come può essere una manovra manuale complessa o anche uno scontro armato tra vascelli.
La consolle di navigazione si divide in tre sezioni; di seguito la descrizione:
3.1.1 – Sezione Sinistra
La sezione sinistra della consolle di navigazione può essere a sua volta divisa in due parti; la parte superiore e la parte inferiore. Nella parte superiore possiamo trovare gli indicatori di potenza dei vari tipi di propulsione: warp, impulso e di manovra. Nella parte sottostante della nostra consolle LCARS vi sono i comandi che servono per abilitare la consolle ad un suo uso diverso; dal più semplice a quello più avanzato. Nella parte inferiore, quando si deve inserire una rotta, appare inoltre una mappa stellare; ciò avviene digitando i tasti “heading/bearing” e “imput corse co-ordinates”.
3.1.2 – Sezione Destra
Nella sezione destra troviamo il vero strumento attraverso il quale si pilota la nave. Qui si trovano dei tasti che formano un cerchio, che si divide in più parti dal ruolo diverso. Nella parte a sinistra si trovano i tasti riguardanti il fattore warp. Nella parte destra, invece, i tasti riguardanti la velocità impulso, è qui che si trova la scala impulso. La sezione interna del cerchio è destinata al controllo della rotta; più precisamente, agendo su questi tasti, è possibile fare virare la nave a dritta o babordo, oppure picchiare o cabrare.
3.1.3 – Sezione Centrale
Nella sezione centrale della consolle di navigazione si trovano 6 tasti estremamente importanti. Questi sono: Automated Navigation, Heading/Bearing, Imput Corse Co-ordinates, Full Stop/Cut Power, Engage Warp e Dis-Engage Warp.
Automated navigation abilita la navigazione automatica, la quale lascia al computer il compito di supervisionare la navigazione e di effettuare correzioni di rotta nel caso si riveli necessario oppure di eseguire delle manovre decise dal timoniere; è comunque consigliato seguire le operazioni automatiche eseguite dal computer. I tasti Heading/bearing ed Imput corse co-ordinates, sono i tasti che consentono l’impostazione e l’attivazipone di una rotta. Il tasto Full stop/Cut power serve per arrestare completamente la nave o per tagliare l’energia ai motori. I tasti Engage e Dis-engage warp, infine, servono rispettivamente per iniziare e terminare il viaggio a curvatura.
3.2 – Il Sistema di Smorzamento Inerziale
Questo sistema svolge l’importantissimo compito di contrastare le forti accelerazioni inerziali create durante la normale navigazione; queste accelerazioni, se non contrastate, potrebbero causare danni all’equipaggio ed alla nave stessa nel caso che superino una certa soglia di velocità. Per questo si rivela fondamentale questo sistema a manipolazione campo, chiamato anche IDS. Quest’ultimo opera assieme ad un altro sistema, il SIF, che ha lo scopo di fornire, tramite campi di forza, rigidità alla struttura e resistenza dalla forza esercitata dai motori sulla nave.
L’IDS opera per mezzo di un campo di forza, sempre costante e a bassa intensità, che agisce su tutta la parte abitabile della nave. Il sistema opera anticipando gli effetti delle accelerazioni inerziali. Il sistema IDS rende l’equipaggio insensibile alle variazioni di accelerazione del moto, ma non può impedirlo nel caso di manovre veloci, riduzione di energia al sistema o in caso di cause esterne che variano il moto.
3.3 – Il Deflettore di Navigazione
Il deflettore di navigazione è un altro sistema indispensabile per navigare in sicurezza su un vascello. Mentra la nave è in movimento incontra sempre detriti di qualsiasi genere e grandezza. Quando si viaggia a curvatura il pericolo di incontrare questi detriti sta nel fatto che, ad una velocità tale, anche i detriti più piccoli possono danneggiare la struttura della nave, creando delle microfratture. Il disco del deflettore, dal quale esce la componente discorsiva del sistema, scompone quest’ultima in due parti, differenti in potenza. Una di potenza bassa, che forma un sistema di scudi parabolici, che deviano i detriti per la lunghezza della nave fino a che il pericolo di collisione sia estinto, e una di potenza più elevata, che è il raggio deflettore ed ha effetti contrari a quelli del raggio traente.
3.4 – I Sensori di Navigazione
I sensori di navigazione si trovano nella parte superiore e nella parte inferiore della prua della nave. Questi sono connessi direttamente con il computer di bordo, siccome quest’ultimo ha il compito di elaborare il più velocemente possibile le informazioni rilevate dai sensori e fornire così al più presto le informazioni necessarie alla navigazione. Le informazioni ricevute dai sensori servono per rilevare la velocità, la posizione della nave. I dati raccolti dai sensori di navigazione, sono fondamentali, inoltre, per comporre il complesso sistema di cartografia stellare. E’ grazie a questi sensori e all’elaborazione del computer di bordo, quindi, che si hanno sempre ampliazioni delle mappe stellari.
4 – I Sistemi Propulsivi
I sistemi propulsivi sono quelli che permettono ad una unità spaziale di muoversi. I sistemi propulsivi attualmente usati sono 3; essi sono: la propulsione di manovra, la propulsione ad impulso e la propulsione a curvatura.
4.1 – La Propulsione di Manovra
Questo tipo di propulsione è fondamentale ed è usata per tutti gli spostamenti che richiedono una notevole precisione e che non possono essere eseguite ad una velocità troppo elevata. Queste manovre sono generalmente gli atterraggi, i decolli e gli attracchi. Questi propulsori si trovano a dritta, a babordo, a prua e a poppa, oltre che sugli scafi ventrale e dorsale. Il motivo per cui questi propulsori si trovano su ogni lato dell’unità spaziale è molto semplice; per prima cosa, avendo la nave la necessità di essere il più precisa possibile mentre si usa questa propulsione, i motori si trovano su ogni fronte della nave, per consentire una veloce modifica di rotta; inoltre, cosa molto importante, questi propulsori svolgono il loro ruolo in modo che se il propulsore di dritta si attiva, la nave si sposterà verso babordo, e viceversa per tutti gli altri. Infatti è il principio della spinta che sta alla base di questo tipo di propulsione.
4.2 – La Propulsione a Impulso
La caratteristica principale di questo tipo di propulsione è che permette ad una unità spaziale di viaggiare a velocità subluce; è quindi usata per spostamenti che non prevedono vaste distanze da percorrere. Questa propulsione viene usata per i viaggi all’interno dei sistemi solari, ma non solo; la propulsione ad impulso è quella usata nel caso di uno scontro armato tra vascelli, perché, al contrario della curvatura, questa propulsione permette alla nave una maggiore manovrabilità assieme ad una certa velocità. Altri casi in cui si usa la propulsione ad impulso sono: avvicinamento e allontanamento da moli di attracco, entrata in orbita, e infine le nebulose. Quest’ultime causano disfunzioni ai sistemi che vedremo più avanti.
La velocità di impulso è comunemente rappresentata tramite frazioni sulla CONN. Queste sono per esempio: ¼, ½, ¾, 1. Il numero 1 indica, in condizioni normali, il massimo impulso raggiungibile da parte del velivolo, che sulle navi stellari equivale a 0,25c, ma se ci fossero disfunzioni e l’energia dei motori fosse ridotta il nostro massimo impulso non equivarrebbe più a 0,25c ma una velocità inferiore
I viaggi con la propulsione possono avere degli effetti relativistici se mantenuti troppo a lungo; questi effetti si esplicano con la teoria della Relatività Ristretta, secondo la quale, su un sistema in movimento, il tempo scorre il 60% più lento che in un sistema fermo; per questo motivo non è consigliabile viaggiare per lungo tempo a velocità subluce. Il controllo di questi effetti è di competenza del timoniere.
4.3 – La Propulsione a Curvatura
La propulsione a curvatura ha come principale caratteristica quella di permettere viaggiare a velocità anche molto superiori a quella della luce. Questo si ottiene facendo creare, dal propulsore a curvatura, un campo di curvatura; questo si chiama così perché ha lo scopo di curvare lo spazio avvicinando notevolmente il punto di partenza e quello di arrivo. Quando si usa questo sistema propulsivo la nave non può compiere variazioni di rotta se non di scarsa entità, in quanto si rischierebbe, con variazioni di rotta troppo elevate, di uscire dal campo di curvatura. Un’altra curiosità sta nel fatto che, durante un viaggio a curvatura, la nave resta ferma nel campo creato attorno ad essa. Con questo tipo di propulsione di possono percorrere distanze enormi e da fattore a fattore, che vanno da 1 a 10, c’è un aumento esponenziale di distanza percorsa.
Per rendersi meglio conto delle distanze percorribili a curvatura e delle variazioni che ci sono da un fattore all’altro inserisco la seguente tabella.
Premetto che 1 cochrane equivale alla velocità della luce e che la velocità della luce è di quasi 300000 km al secondo.
Fattore di curvatura = Cochrane
1 = 1
2 = 10
3 = 39
4 = 102
5 = 214
6 = 392
7 = 656
8 = 1024
9 = 1516
Importante è anche sapere che il fattore di curvatura 10 è solo teorico, in quanto il raggiungimento di esso farebbe si di trovarsi in ogni punto dell’universo nello stesso momento.
Il timoniere, per attivare la propulsione a curvatura, deve obbligatoriamente eseguire dei controlli, al fine di evitare i rischi e i malfunzionamenti; esegue così i controlli pre-curvatura.
4.3.1 – I Controlli Pre-Curvatura
I controlli pre-curvatura sono in sotanza 4. Sono atti a controllare che i sistemi della nave funzionino correttamente e che non ci siano problemi riguardo la creazione del campo di curvatura. I controlli sono:
-1) Controllo dell’efficienza del deflettore di navigazione; che come spiegato, è fondamentale ad una velocità elevata come la curvatura.
-2/3) Controllo della presenza di altre navi o corpi fissi che emanano interferenze gravimetriche ed EM; queste interferenze non permettono la perfetta creazione del campo di curvatura ( il 2 e il 3 controllo sono messi assieme in questo punto).
-4) Richiesta della disponibilità del campo di curvatura alla sezione ingegneria; è qui che, per esempio, si esplica il contatto plancia-ingegneria, che è fra i compiti del timoniere.
In seguito a questi controllo è possibile attivare la propulsione a curvatura, dietro comando dell’ufficiale in comando.
5 – Alcuni fenomeni spaziali rilevanti per la navigazione
I fenomeni che si possono trovare durante la navigazione sono molteplici, ma quelli che possono causare disagi durante questa più conosciuti sono: I buchi neri, le nebulose e i tunnel spaziali.
5.1 – I Buchi Neri
I buchi neri sono i fenomeni spaziali più misteriosi che possiamo trovare nell’universo. Sono caratterizzati da un eccezionale forza gravitazionale, che riesce a “risucchiare” tutto ciò che si trova nel suo raggio d’azione. Una volta che un vascello viene catturato dalla forza gravitazionale di un buco nero è estremamente difficile sfuggire. Un buco nero è una palla di materia estremamente densa e per questo nulla di ciò che si trova troppo vicino può sfuggirgli. Solo da poco si è cominciato a comprendere meglio i misteri dei buchi neri, ai quali sono state attribuite capacità come quelle di essere portali per altre dimensioni (teoria del buco bianco), mentre in altri casi possono rivelarsi habitat naturali per forme di vita aliene. I buchi neri attirano anche la luce, per questo vengono chiamati buchi neri. Questi fenomeni hanno la capacità di curvare lo spazio in loro prossimità, creando un “pozzo gravitazionale”, delimitato da un confine chiamato “pozzo degli eventi”.
5.2 – I Tunnel Spaziali
I tunnel spaziali sono punti di collegamento di due punti dello spazio, che esistono nel normale continuum spazio/temporale. La maggior parte di essi è piuttosto instabile e i loro estremi fluttuano molto attraverso il tempo e lo spazio. Il collegamento che si apre è subspaziale e i due punti potrebbero essere distanti anche milioni di anni luce. Purtroppo a causa della loro instabilità, questi fenomeni offrono, spesso, solamente la possibilità di raggiungere l´altra estremità del tunnel ma nel caso il tunnel venisse ripercorso a ritroso è improbabile di ritrovarsi nel punto da cui si era partiti. Un tunnel spaziale famoso è quello che si trova vicino alla base stellare Deep Space 9.
5.3 – Le Nebulose
Le nebulose sono appunto nubi interstellari di gas e polveri e sono suddivise ulteriormente a seconda della loro composizione e illuminazione. In questi fenomeni spaziali, la densità media del gas e della polvere, è superiore al normale. Le complicazioni che ne derivano sulla navigazione sono molteplici. Abbiamo l’impossibilità di procedere a curvatura, in quanto in una nebulosa non è possibile creare il campo di curvatura. In una nebulosa i sensori non funzionano correttamente, ne deriva che, nel caso si debba fare fuoco con i phaser, il puntamento automatico non sarà preciso, anzi sarà inefficiente. Nella nebulosa, inoltre, gli scudi non sono attivi. Una famosa manovra di combattimento tra vascelli si svolge dentro una nebulosa; si tratta della manovra inventata dal Capitano Kirk, sotto ispirazione del vulcaniano Spock, che permise di sbaragliare Khan, sfruttando proprio alcune delle proprietà della nebulosa.
6 – La Navigazione
La navigazione è un compito che può sembrare semplice e forse lo è anche in alcuni frangenti, ma non si devono sottovalutare le difficoltà che si possono incontrare durante uno scontro tra vascelli. Ci sono alcune cose che un timoniere deve sapere, per potere mantenere fuori pericolo l’equipaggio di cui fa parte. E’ importante non sottovalutare la velocità che una nave può raggiungere con la propulsione a impulso; solo ¼ di impulso equivale a 18750 Km/s. La propulsione ad impulso non deve mai essere attivata all’interno dell’atmosfera di un pianeta, perché la velocità raggiunta potrebbe rendere incontrollabile la nave e fare correre rischi inutili. Infine, un ultimo accorgimento importante è quello di procedere con i propulsori di manovra fino alla distanza di sicurezza e poi attivare l’impulso. Di seguito inserisco le procedure per un buon decollo e atterraggio e le modalità per inserire una rotta.
6.1 – Decollo e Atterraggio
La prima cosa da fare, appena seduti alla CONN, ma anche ad ogni altra postazione, è attivare la consolle ed eseguire una diagnostica di 4 livello dei sistemi di guida.
Poi bisogna aprire un canale radio con il controllo volo e richiedere il permesso al decollo e la pista assegnata per decollare.
Bisogna poi attivare i propulsori di manovra e sganciare la nave dal pilone/morse di attracco, poi dirigere la nave verso la pista assegnata.
Il passaggio seguente riguarda l’allineamento della navetta con la pista assegnata, una volta che questa è stata raggiunta.
Poi si devono sincronizzare le armoniche della nave con quelle dell’hangar da cui si parte, passo fondamentale per riuscire ad oltrepassare il campo di forza coincidente con l’uscita dell’hangar.
Uscire dall’hangar con i propulsori di manovra (tutte queste operazioni vanno svolte con i motori di manovra) e se ci si trova sulla superficie di un pianeta mantenere i propulsori di manovra fino all’uscita dall’atmosfera, altrimenti, se ci si trova su una base spaziale, è consigliabile mantenere la propulsione di manovra fino al raggiungimento della distanza di sicurezza.
Per l’atterraggio si eseguono le stesse operazioni, ma leggermente variate.
Per primo abbiamo l’avvicinamento all’hangar nel quale si deve entrare. Poi si richiede il permesso di atterraggio e la pista al controllo volo, dopo avere aperto il canale.
Si devono sincronizzare le armoniche ed eseguire l’avvicinamento all’hangar. Dentro l’hangar è obbligatorio usare la propulsione di manovra, si allinea la nave alla pista e la si porta fino al pilone/morse di attracco, dove si può spegnere la nave o mettere in stand-by la consolle.
6.2 – Inserimento di una Rotta
E’ importante sapere che ogni nave stellare ha un enorme database di informazioni e cartografie, che vengono costantemente aggiornate mediante l’uso dei sensori di navigazione. Questi dati sono fondamentali per capire dove ci si trova esattamente ed il computer è in grado di stabilirlo con un margine di errore non superiore a 10 Km; anche a curvatura il margine di errore è minimo, cioè non superiore a 100 Km. Se la nave sta compiendo manovre di precisione, come l’attracco, la precisione diventa altissima, tanto da evitare qualsiasi errore che non sia di responsabilità del timoniere. Esistono 5 modi differenti per impostare una rotta. Quello più semplice è di dare la destinazione finale al computer, il quale consulterà la propria banca dati della navigazione e porterà automaticamente la nave a destinazione. Si può anche inserire come destinazione un settore, in modo tale che il computer ci porterà esattamente al centro di quella data area.
Il timone può essere impostato per raggiungere anche un oggetto in movimento, purché esso si trovi nel raggio dei sensori. Questa è la rotta di intercettazione ed è calcolata dal computer, che richiede l’inserimento, da parte del timoniere, della velocità o del tempo di intercettazione per poterla calcolare.
Un altro sistema, anche se usato di rado, è il sistema delle coordinate galattiche della destinazione. Queste coordinate sono rappresentate da due numeri; il primo indica se la nave deve virare e di guanto deve farlo, il secondo indica se la nave deve cabrare o picchiare. I numeri componenti delle coordinate si ottengono ponendo degli assi perpendicolari immaginari attorno alla nave che compiono un circolo attorno ad essa (troviamo quindi 360°); in queste linee immaginarie lo 0 punta sempre dritto e avanti. Se avessimo la rotta 000.0 la nave dovrebbe proseguire sulla stessa rotta, mentre se si avessero le coordinate 090.0 dovremmo semplicemente virare a dritta di 90°, ma non compiere nessuna cabrata o picchiata.
Si possono inserire rotte anche usando le coordinate galattiche. Anche queste coordinate sono dei numeri, ma a differenza delle altre, queste si ottengono collegando, con una linea immaginaria, la nave al centro della galassia. In questo caso le coordinate 000.0 indicano il centro della galassia.
7 – Navigazione Avanzata
Questo tipo di navigazione è molto più complesso del semplice decollo o atterraggio e dell’attivazione di una rotta o di una propulsione. Si rivela infatti necessario essere in grado di eseguire manovre più complesse quando ci si trova in situazioni pericolose. La situazione in cui un timoniere deve fare uso di queste manovre e delle sue capacità, di cui più spesso ho sentito parlare è il combattimento armato tra vascelli. In questi frangenti il timoniere può accedere a due importanti modalità della sua consolle. Questi sono dei tasti che se usati fanno accedere alla modalità Tattica ed Emergenza; delle quali parlerò fra poco. E’ importante dire anche che un timoniere non può affidarsi solo ad un paio di tasti pigiati, ma è fondamentale che egli abbia fantasia nell’usarli e combinarli tra loro, per dare vita a manovre decisive ed al tempo stesso spettacolari; il tutto in sicurezza.
7.1 – La Modalità Tattica
Questa modalità è fondamentale per il timoniere, perché tramite questa sarà in grado di carpire tutte le informazioni che gli servono per la navigazione durante uno scontro. Capiterà sicuramente, infatti, che il timoniere abbia bisogno di sapere la velocità assunta dagli altri vascelli, la condizione dei loro scudi, le loro armi. Potrà sapere quali sono gli scudi più forti e quelli più deboli di ogni nave (anche la propria), in modo da adeguare la navigazione a queste informazioni. Tutte queste informazioni sono date da questa modalità. E’ fondamentale, inoltre, che il timoniere sappia quale è l’arco di fuoco della nave che sta pilotando, perché questa informazione, assieme alle altre, permetterà di avere la meglio durante uno scontro. L’arco di fuoco è la porzione di spazio entro la quale una nave può agganciarne un’altra e fare fuoco colpendo il bersaglio.
7.2 – La Modalità Emergenza
Questa modalità è selezionabile sulla consolle e permette al timoniere di eseguire delle manovre pre impostate. Queste manovre sono molto più veloci del normale, ma hanno lo svantaggio di aumentare notevolmente lo stress strutturale della nave. Per questo motivo vanno usate con cautela e giudizio. Il livello di stress strutturale è controllabile tramite questa modalità, in quanto appare automaticamente quando è attivata; lo stress strutturale cala progressivamente se lo scafo non è soggetto ad altre sollecitazioni. Ogni manovra di emergenza effettuata fa aumentare il livello di stress strutturale di almeno il 25%. Le manovre di emergenza che possiamo trovare in questa modalità sono:
- Arresto di emergenza; manovra che permette di fare fermare il vascello nel giro di pochi istanti. Sfrutta l’azione combinata dei motori di manovra e dei propulsori a impulso indietro tutta. Viene usato quando un arresto totale standard non è sufficiente, ma si possono elaborare strategie di combattimento anche con questa manovra.
- Virata di emergenza; è una virata di 90° che può essere effettuata sia a dritta che a babordo. E’ molto più veloce di una virata standard.
- Inversione di emergenza; con questa manovra il vascello compie una virata o inversione di 180° scambiando le posizioni di prua e poppa. Come le altre manovre di emergenza è più veloce di una inversione standard.
8 – Manovre Speciali
Le manovre “speciali”, così mi piace definirle, sono delle manovre ideate dai più famosi capitani ed ufficiali della flotta. Tra le molte presenti nel computer di bordo ne ho scelte due, che sono quelle che più mi sono piaciute e che mi hanno ispirato. Queste sono la Manovra Picard e La Manovra Kirk.
8.1 – “Manovra Picard” di Jean-Luc Picard
La situazione è tale che il nemico è tecnologicamente avanzato e potrebbe viaggiare a velocità superiori a quella della luce, ma non veloce quanto una nave della flotta stellare. Le loro armi al plasma sono potentissime e i sensori indicano che non possono individuare gli spostamenti a velocità superiore alla luce. Il limite di questa manovra sta nel fatto dell’impossibilità del nemico di individuare questi spostamenti, se non è così la manovra non può avere effetto.
La spiegazione di questa manovra è piuttosto semplice. Picard è al comando di una nave che si trova lontana 9 milioni di Km da quella nemica, distanza che la luce impiega 30 secondi per percorrere. Decide così di utilizzare la curvatura per raggiungere il nemico, che non sarà in grado di rilevare lo spostamento fino al momento in cui la nave di Picard sarà abbastanza vicina. Il trucco sta nel fatto che, la nave del capitano impiega 30 secondi a percorrere la distanza che la separa dai nemici, ma quando entrerà in curvatura, quest’ultimi vedranno ancora l’immagine della nave di Picard nello stesso luogo per qualche secondo ancora e quando la nave si troverà vicina a loro vedranno una doppia immagine della nave. Questo trucco fa si che i nemici non abbiano il tempo di reagire e quando lo saranno Picard avrà già ordinato di attaccare e la loro nave avrà subito ingenti danni.
8.2 – “Manovra Kirk” di James Tiberius Kirk
Questa è la famosa manovra con la quale il Capitano Kirk è riuscito a sbaragliare la nave di Khan. Ci sono diversi fattori necessari per la buona riuscita della manovra. Entrambe la navi sono danneggiate, ma la nave di Khan ha una potenza di fuoco e velocità maggiori. Khan è intelligente, ma Kirk ha più esperienza. La propulsione della nave di Kirk non può entrare a curvatura. C’è una nebulosa, la Mutara Nebula, vicina.
Kirk vede, a ragione, nella nebulosa una possibilità di vittoria. Decide così di entrare con la nave nella nebulosa e khan, come sperava, lo segue a ruota. Kirk vuole sfruttare le proprietà inibitorie sugli scudi e i sensori della nebulosa, quindi, dopo avere capito, grazie a Spock, che Khan finora aveva sempre viaggiato in due dimensioni, mai verso l’alto e verso il basso, dà ordine di spostarsi verso il basso di 10 Km e di manovrare per trovarsi dietro alla nave di Khan. Ordina quindi al tattico di sparare dei siluri fotonici, che infliggono un colpo mortale alla nave di Khan.
CLASSIFICAZIONE SETTORI

Un sotto-quadrante è un cuneo a forma di fetta del disco galattico. Ci sono un totale di 36 sotto-quadranti diversi nella Via Lattea. Ognuno è lungo 50.000 anni luce e alto 3.600 anni luce, di un'ampiezza di 8.727 anni luce nel suo punto più ampio. La prima cifra della designazione di un settore è il suo sotto-quadrante.

Una zona di settore è un cerchio concentrico di 5.000 anni luce di larghezza e di 3.600 anni luce di altezza. Ci sono 10 zone di settore nella Via Lattea. La seconda cifra della designazione di un settore è la sua zona di settore.

Il punto in cui un sotto-quadrante e una zona di settore convergono è chiamato griglia di settore. Questa divisione dello spazio è approssimativamente di 5.000 x 5.000 x 3.600 anni luce.
La designazione della griglia di settore per i settori di Sol e kilka, e la maggior parte degli altri mondi della Federazione è 15 (sotto-quadrante 1, zona di settore 5)
Una griglia di settore è ulteriormente suddivisa in 100 quadranti di settore di uguale volume.
Sono numerati da 00 a 99, e rappresentano la terza e la quarta cifra della designazione di un settore.

Ogni quadrante di settore è ancora suddiviso in qualcosa chiamato blocco di settore.
In media, i blocchi di settore sono circa 100 x 100 x 100 anni luce in termini di dimensioni.
Ci sono 1.000 blocchi di settore in ogni quadrante di settore, numerati da 000 a 999. Queste cifre compongono le successive tre cifre della denominazione del settore.
Infine, I blocchi di settore sono suddivisi in 100 unità di 20 x 20 x 20 anni luce in termini di volume, etichettate da 00 fino a 99, e rappresentano le ultime due cifre nella designazione del settore. Un settore tipico nello Spazio della Federazione contiene tra sei e dieci sistemi solari.
GRIGLIA 15
QUADRANTE 02
BLOCCO 173
UNITA' 27
La designazione ufficiale del Settore kilka è SETTORE 150217327. Tuttavia, la griglia e i numeri di quadrante sono spesso omessi nella designazione, come la maggior parte dello spazio esplorato che si trova all'interno della Griglia 15 Quadrante 02.
Di conseguenza, la maggior parte dei settori sono semplicemente indicati dal loro blocco e dalla Denominazioni di settore (il settore kilka è convenzionalmente noto come Settore 17327). Dato questo sistema di numerazione, le ultime cinque cifre della denominazione di settore sono uniche ad una distanza di almeno 800 anni luce, e le ultime due cifre saranno sempre uniche per una distanza di 80 anni luce. Naturalmente, molti settori sono comunemente denominati con il nome della stella dominante entro i suoi confini, eliminando ulteriore confusione.
